面向通用机器人的基础模型 综述与基础软件开发综合分析
随着人工智能技术的飞速发展,通用机器人已成为科技领域的热点研究方向。基础模型作为支撑机器人智能化的核心技术,正逐步推动机器人从单一任务执行向多场景、自适应交互的转变。本文对面向通用机器人的基础模型进行综述,并对其基础软件开发进行综合分析,旨在为相关研究和实践提供参考。
一、通用机器人与基础模型的融合背景
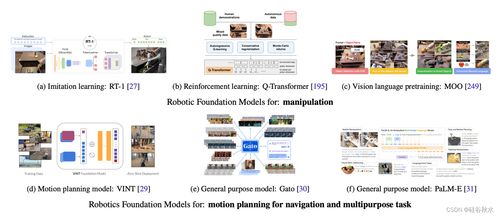
通用机器人旨在模拟人类在复杂环境中的感知、决策与行动能力,其核心挑战在于处理多样化的任务和不确定的环境。基础模型,如大语言模型(LLMs)和视觉-语言模型(VLMs),通过预训练和大规模数据学习,为机器人提供了强大的语义理解、推理和生成能力。例如,GPT系列和CLIP等模型已被应用于机器人任务规划、自然语言交互和视觉导航中,显著提升了机器人的通用性和适应性。
二、基础模型在通用机器人中的关键应用
- 任务规划与决策:基础模型能够解析自然语言指令,生成可执行的机器人动作序列。例如,结合强化学习,机器人可以动态调整策略以应对突发情况。
- 环境感知与交互:通过视觉-语言模型,机器人能够识别物体、理解场景上下文,并与人类进行自然对话。这在服务机器人和工业自动化中具有广泛应用。
- 仿真与迁移学习:基础模型支持虚拟环境中的仿真训练,加速机器人技能的迁移到现实世界,降低开发成本。
三、基础软件开发的关键要素与挑战
基础软件开发是通用机器人实现落地的核心环节,涉及以下方面:
- 模块化架构设计:软件需采用分层架构,如感知层、决策层和执行层,确保各模块可独立升级和集成。ROS(机器人操作系统)是常见框架,但需适配基础模型的高计算需求。
- 数据管理与预处理:基础模型依赖大规模多模态数据,软件开发需包含高效的数据采集、标注和增强工具,以提升模型鲁棒性。
- 实时性与安全性:机器人软件必须保证低延迟响应和故障容错,尤其在安全关键场景(如医疗或自动驾驶)中,需集成验证和监控机制。
- 开源生态与标准化:社区驱动的开源项目(如PyRobot或NVIDIA Isaac)促进了工具共享,但标准化接口和协议仍需完善,以解决兼容性问题。
四、未来趋势与展望
未来,面向通用机器人的基础模型将更注重多模态融合、小样本学习和能源效率。基础软件开发需向云-边协同和自适应学习演进,同时加强伦理与隐私保护。随着5G和边缘计算的发展,机器人有望在家庭、医疗和工业领域实现更广泛的普及。
基础模型为通用机器人注入了强大的智能潜力,而基础软件开发是确保其可靠部署的关键。通过跨学科合作和技术迭代,我们正迈向一个高度自主的机器人时代。
如若转载,请注明出处:http://www.7gfun.com/product/20.html
更新时间:2025-11-28 03:01:58